PARAMETERS
General
Parameter |
Default |
Unit |
Description |
Name |
|
|
Name of generator |
Pref |
0 |
MW |
Set actual power |
Profile |
Default |
|
Name of the generator power profile |
f/P-droop |
0 |
% |
Governor droop (island mode) |
Isochronous control |
|
|
Isochronous control present (island operation) |
Mode |
Cos phi control |
|
Cos phi control or reactive power control |
cos(φ) |
0.85 |
|
Power factor |
Qref |
0 |
Mvar |
Set reactive power |
Q |
supply |
|
Reactive power direction (supply / absorb) |
Uref |
1 |
pu |
Reference voltage of voltage as a factor of Unom of the node |
U/Q-static |
0 |
% |
Voltage-reactive power static |
Q-limit |
|
|
Q control limit application |
Other control node |
|
|
Voltage control based on other node |
Generator
Parameter |
Default |
Unit |
Description |
Type |
|
|
Generator type |
Unom |
1) |
kV |
Nominal voltage of the generator |
Snom |
0 |
MVA |
Nominal apparent power |
cos phi nom |
0.85 |
|
Nominal cos phi |
Qmin |
0 |
Mvar |
Lower limit for the reactive power to be supplied |
Qmax |
0 |
Mvar |
Upper limit for the reactive power to be supplied |
xd" |
0.2 |
pu |
Sub-transient reactance 2) |
rg |
0 |
pu |
Fictitious resistance |
Excitation |
rotating |
|
excitation system: rotating / static, not terminal fed / static, terminal fed |
Rotor |
turbo |
|
rotor: turbo / salient pole |
IkP |
0 |
kA |
maximum stationary short-circuit current |
Uf,max |
1.3 |
pu |
maximum excitation voltage |
Xd,sat |
1.6 |
pu |
Saturated synchronous reactance |
1) The default value equals the nominal voltage of the node
2) For the calculation of short-circuit currents the saturated value of xd" is taken
Type
The type list contains all generators from the component type database, where the Unom of the generator varies between 80 and 120% of the Unom of the node. See also: Type.
Excitation, Uf,max and xd,sat
The implementation of the excitation and the construction of the rotor is used for calculating the stationary short-circuit current according to IEC 60909. The data on the maximum stationary short-circuit current (IkP), the maximum excitation voltage (Uf, max) and the saturated synchronous reactance (xd, sat) are also required.
•For cylindrical rotor generators: Uf,max is 1.3 or 1.6 pu. and xd,sat between 1.2 and 2.2 pu.
•For salient pole generators: is Uf,max 1.6 or 2.0 pu. and xd,sat between 0.6 and 2.0 pu.
Connection
Parameter |
Default |
Unit |
Description |
Star point earthing |
no |
|
Indicates whether the star point is earthed |
Re |
0 |
Ohm |
Earthing resistance with earthed star point |
Xe |
0 |
Ohm |
Earthing reactance with earthed star point |
External node |
|
|
Node with neutral earth connection |
Pnom' |
|
MW |
Maximal real power; supplementary to Snom |
External node
Possibility to connect the neutral point of the generator to the earthing electrode at another node .
PQ-diagram
Parameter |
Default |
Unit |
Description |
P |
0 |
MW |
Active power points of the generator capability diagram |
Qlimit |
0 |
Mvar |
Reactive power points of the generator capability diagram |
Dynamics
Parameter |
Default |
Unit |
Description |
Rotor |
turbo |
|
Rotor type |
Rg |
0 |
pu |
Stator resistance |
Xl |
0 |
pu |
Leakage reactance |
Xd |
0 |
pu |
Synchronous reactance, d-as |
Xq |
0 |
pu |
Synchronous reactance, q-as |
X0 |
0 |
pu |
Zero sequence reactance |
Xd' |
0 |
pu |
Transient reactance, d-as |
Xq' |
0 |
pu |
Transient reactance, q-as |
Xd" |
0,2 |
pu |
Sub-transient reactance, d-as |
Xq" |
0 |
pu |
Sub-transient reactance, q-as |
Type |
short-circuit |
|
Time constant type |
Td' |
0 |
s |
Transient time constant, d-as |
Tq' |
0 |
s |
Transient time constant, q-as |
Td" |
0 |
s |
Sub-transient time constant, d-as |
Tq" |
0 |
s |
Sub-transient time constant, q-as |
H |
0 |
s |
Inertia |
KD |
0 |
pu |
Mechanical damping constant |
Reliability
Parameter |
Default |
Unit |
Description |
Failure frequency |
0 |
per year |
Mean number of occurrences that the generator fails (short circuit) |
Repair duration |
0 |
minutes |
Mean duration of repair or replacement |
Maintenance frequency |
0 |
per year |
Mean number of occurrences thet the generator is in maintenance |
Maintenance duration |
0 |
minutes |
Mean duration of maintenance |
maint. cut-off duration |
0 |
minutes |
Mean duration of cancellation of maintenance in case of emergency |
MODELLING
Load flow
Cos-phi controlled synchronous generator:
In a load flow calculation, a synchronous generator with cos-phi control is represented as a negative constant power load:
Pload = -Pref
and
Qload = -Pref * √ ( 1 - cos(phi)² ) / cos(phi) (capacitive)
or
Qload = +Pref * √ ( 1 - cos(phi)² ) / cos(phi) (inductive)
Voltage controlled synchronous generator:
Uref is used to give the voltage at the node in pu and is a factor of the Unom of the node given in the form. The following applies:
|U| = Uref * Unom,node
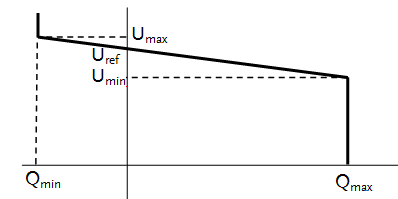
The voltage control determines the reactive power output (within the limits Qmin and Qmax) to obtain the voltage Uref.
the Voltage-Reactive power droop is taken into account here. The trend of the function U = f(Qgenerator) with droop and the limits Qmin and Qmax is shown in the graph U = f(Qgenerator) in the form.
The following applies for a load flow calculation:
| Pgenerator equals Pref |
| Qgenerator depends on Uref, Qmin, Qmax and the voltage-reactive power droop and follows from the state of the network. |
If Qgenerator is within the limits Qmin and Qmax, then Ugenerator will be between Umin and Umax. The relationship between U and Q is then given by the U/Q-droop:
droop = - (dU / Unom ) / (dQ / Snom ) * 100%
For a 10 MVA generator with a U/Q-droop of 10% at a node with a voltage of 10 kV, this means the following:
At a voltage dip of 0.1 kV, the generator will supply 1 Mvar of additional reactive power.
If several generators with voltage control are present at a single node, an "average" Uref is determined in proportion to Snom.
If the value of the U/Q-droop is not specified (thus: zero), a value of 0,1% will be used in the calculations for numerical reasons.
Island mode
A synchronous generator with governor control and voltage control can participate to the regulation in island mode. For efficient regulation, the governor droop must be larger than zero and the summed capacity (P and Q) of all participating generators must be sufficient for the system load.
Synchronous generators with a zero governor droop are considered as constant power generators and do not contribute to the frequency control. Also generators with a fixed cos-phi control do not contribute.
For more information, see: Loadflow: Island mode.
Motor start
During the motor start calculation the synchronous generator is modelled as an equivalent voltage behind its sub-transient impedance:
Uequivalent = Uref + Iload flow,pre * Zgenerator
IEC 60909
In modelling of synchronous generators, a distinction is made between the following three cases in accordance with IEC 60909:
•generators directly connected to the network
•generators connected to the network via a step-up transformer
•power station unit (PSU), whereby the impedance of generator and step-up transformer is considered as a whole
The latter possibility is not supported in Vision. However, it is possible to incorporate a generator into the network via an extra node and a step-up transformer (whether a transformer functions as a step-up transformer is indicated in the transformer form). Where a step-up transformer is used, Unom of the generator must be equal to Unom of the node.
In IEC 60909 calculations, a synchronous generator is represented as a passive impedance to earth. (IEC 60909, clause 3.6)
This impedance is corrected with a factor K. This correction is significant, as the network load is not taken into consideration in IEC 60909. The factor K is determined as follows:
K = cmax * (Unom,node / Unom,generator ) / (1 + Xd" * sin(phi)nom ) )
where:
| cmax | maximum voltage factor (including in a minimum short-circuit current calculation) associated with the Unom of the generator node |
| Xd" | saturated sub-transient reactance of the generator (pu) |
In case Rg of the generator is not specified (Rg=0), for IEC 60909 calculations it is derived from Xd". Depending on the nominal generator voltage and the nominal power, the following apply for Rgenerator and Xgenerator:
Unom,generator <= 1 kV: |
Rgenerator = K ⋅ 0.15 * Xd" Xgenerator = K ⋅ Xd" |
|
Unom,generator > 1 kV: |
||
Snom < 100 MVA: |
Rgenerator = K ⋅ 0.07 Xd" Xgenerator = K ⋅ Xd" |
|
Snom >= 100 MVA: |
Rgenerator = K ⋅ 0.05 Xd" Xgenerator = K ⋅ Xd" |
|
For synchronous generators, in contrast to static network components, the normal impedance differs from the inverse impedance (Z2 not equal to Z1). For the two-pole synchronous machine, however, Z2 is approximately equal to Z1.
IEC 60909 makes no specification for inverse impedances (modelling of inverse impedances is currently in preparation), so that Vision also applies Z2 = Z1 here.
The zero sequence impedance Z0 is infinite with a floating neutral point and 3*Re+j(3*Xe + 0.5*X1) with an earthed neutral point.
Fault analysis
In the sequential fault analysis, the synchronous generator is represented as a Norton equivalent. The following applies for the source impedance of this equivalent:
Zgenerator = Rg + jXd"
For the inverse impedance, the following applies: Z2 = Z1.
The zero sequence impedance Z0 is infinite with a floating neutral point and 3*Re+j(3*Xe + 0.5*X1) with an earthed neutral point.