Het netmodel in de module is geschikt voor de analyse van elektromagnetische transiënten van honderden milliseconden tot enkele seconden. Typische voorbeelden van deze transiënten zijn kortsluitingen en spanningsdips. Daarnaast zijn de modellen geschikt voor de analyse van elektromechanische transiënten als het aanlopen van een motor of rotorhoek-/snelheidsslingeringen van elektrische machines (transiënte stabiliteit) na een kortsluiting. Snelle elektromagnetische transiënten, bijvoorbeeld het gedrag van het net na blikseminslag of de ontwikkeling van een vlamboog tijdens een kortsluiting, zijn op dit moment bij de modellering buiten beschouwing gelaten.
Bij de elektromagnetische aanpak worden alle objecten middels differentiaalvergelijkingen gemodelleerd. Elke spoel of condensator wordt door een differentiaalvergelijking vertegenwoordigd. Berekeningen met dit soort modellen zijn zeer nauwkeurig, maar kosten relatief veel tijd. Daarom is de module meer geschikt voor de analyse van kleine en middelgrote netten.
Om de snelheid van de berekeningen te bevorderen kunnen de modellen intern naar de synchroon-draaiende DQ0-referentie worden getransformeerd. Het voordeel van deze transformatie is dat de spanningen en stromen tijdens de stationaire situatie constant zijn, waar deze in de ABC-referentie sinusoïdaal veranderen. Tezamen met het gebruik van een variabele-tijdstap-oplosser voor numerieke oplossing van differentiaalvergelijkingen, leidt dit tot snellere berekeningen ten opzichte van traditionele pakketten voor simulatie van elektromagnetische transiënten.
De voor dynamische analyse gemodelleerde objecten zijn:
•verbindingen en kabels
•transformatoren
•nulpuntstransformatoren
•netvoedingen
•belastingen
•condensatoren
•spoelen
•asynchrone generatoren en motoren
•synchrone motoren
•synchrone generatoren, inclusief:
obekrachtigingssystemen;
opower system stabilizer;
oblindvermogen- en arbeidsfactorregelingen;
oturbineregelingen;
Alle objecten, behalve de synchrone en asynchrone machines behoeven geen extra gegevens t.o.v. de statische gegevens. Voor de in ster geschakelde elementen kan via tabblad Aansluiting gekozen worden of het sterpunt geaard is. Indien het sterpunt geaard is middels een impedantie kan de impedantie hier gespecificeerd worden.
Verbinding en kabel
Alle kabels worden als default middels het π-model gerepresenteerd. Er bestaat een mogelijkheid om de dwarscapaciteiten van de kabels collectief te verwaarlozen, dit kan via de berekeningsopties van Dynamische analyse onder tab Geavanceerd. Hiernaast kunnen dwarscapaciteiten van individuele kabels worden verwaarloost (tabblad Dynamica), een kabel wordt nu middels een serieschakeling van een weerstand en reactantie gerepresenteerd. Het verwaarlozen van de dwarscapaciteiten (in situaties wanneer ze geen of weinig invloed hebben, bijvoorbeeld voor korte kabels) resulteert in een significante snelheidswinst.
Indien kabels gerepresenteerd worden middels het π-model heeft dit direct gevolgen voor de analyse van kortsluitingen op een knooppunt. De helft van dwarscapaciteit van de kabel wordt nu immers direct kortgesloten, hetgeen zowel numeriek (numerieke oplosmethode) als praktisch ongewenst is. Om dit te voorkomen kan onder tabblad Dynamica gekozen worden om een kabel middels het T-model te representeren. Tevens kan hier gekozen worden om een kabel uit meerdere T- of π-secties te laten bestaan. Het vergroten van het aantal secties maakt de simulatie nauwkeuriger (in de werkelijkheid is de dwarscapaciteit langs de hele kabellengte verspreid), maar aan de andere kant wordt de berekening trager.
Transformator
De transformator wordt met zes mutueel-gekoppelde spoelen gemodelleerd (negen voor driewikkelingstransformator). Parameters van transformator worden uit de gegevens van kortsluit- en nullasttesten bepaald. Voor een correct dynamisch model is de nullaststroom van groot belang. Via de nullaststroom wordt de grootte van mutuele inductieve koppelingen tussen de spoelen bepaald. Indien de nullaststroom onbekend is, kan deze tussen 1% en 2% van de nominale stroom van de transformator gezet worden. Dit zou garanderen dat de mutuele koppelingen in het transformatormodel groot genoeg zijn. In de huidige versie wordt er geen Z-schakeling van wikkelingen ondersteund.
Nulpuntstransformator
De nulpuntstransformator is middels homopolaire weerstand R0 en reactantie X0 gemodelleerd. Indien het sterpunt van de nulpuntstransformator via impedantie Ra+jXa geaard is, kan deze op tabblad Aansluiting gespecificeerd worden. De totale homopolaire weerstand en reactantie van de nulpuntstransformator worden dan bepaald als: R0+3*Ra en X0+3*Xa.
Netvoeding
De netvoeding wordt met de driefasenspanningsbron achter de weerstand en de spoel gerepresenteerd. Er bestaat de mogelijkheid om de grootte van de spanning van de spanningsbron op elke fase dynamisch in te stellen (zie Casus en gebeurtenissen).
Belasting
De belasting wordt middels het constante-impedantie-model gerepresenteerd. Een inductieve last wordt gevormd door de serieschakeling van een weerstand en spoel. Capacitieve belastingen worden gemodelleerd als een parallelschakeling van een weerstand en condensator. Belastingen zijn in ster geschakeld en symmetrisch.
Condensator
De condensator wordt met de capaciteiten in Y-schakeling van fasen gerepresenteerd.
Spoel
De spoel wordt met de inductiviteiten in drie fasen gerepresenteerd. Alleen Y-schakeling van fasen is ondersteund.
Synchrone generator en motor
De synchrone machine wordt met het gedetailleerde elektromagnetische model gerepresenteerd. Voor een uitgebreide beschrijving van het model zie bijvoorbeeld het boek van Kundur “Power System Stability and Control”.
Machines met buitenpoolrotor wordt met 8 differentiaalvergelijkingen gemodelleerd:
•3 differentiaalvergelijkingen voor statorfluxes
•1 differentiaalvergelijking voor de veldwikkeling
•2 differentiaalvergelijkingen voor demperwikkelingen (1d, 1q)
•1 differentiaalvergelijking voor de rotorsnelheid
•1 differentiaalvergelijking voor de rotorhoek.
De synchrone machine met turborotor wordt middels 9 differentiaalvergelijkingen gemodelleerd:
•3 differentiaalvergelijkingen voor statorfluxes,
•1 differentiaalvergelijking voor de veldwikkeling,
•3 differentiaalvergelijkingen voor demperwikkelingen (1d, 1q, 2q)
•1 differentiaalvergelijking voor de rotorsnelheid
•1 differentiaalvergelijking voor de rotorhoek.
De modelparameters worden uit de synchrone, transiënte en subtransiënte reactanties en tijdconstanten bepaald. Voor dynamische modellering van de synchrone machine zijn extra gegevens nodig. Deze staan op de tabblad Dynamica van het invoerformulier.
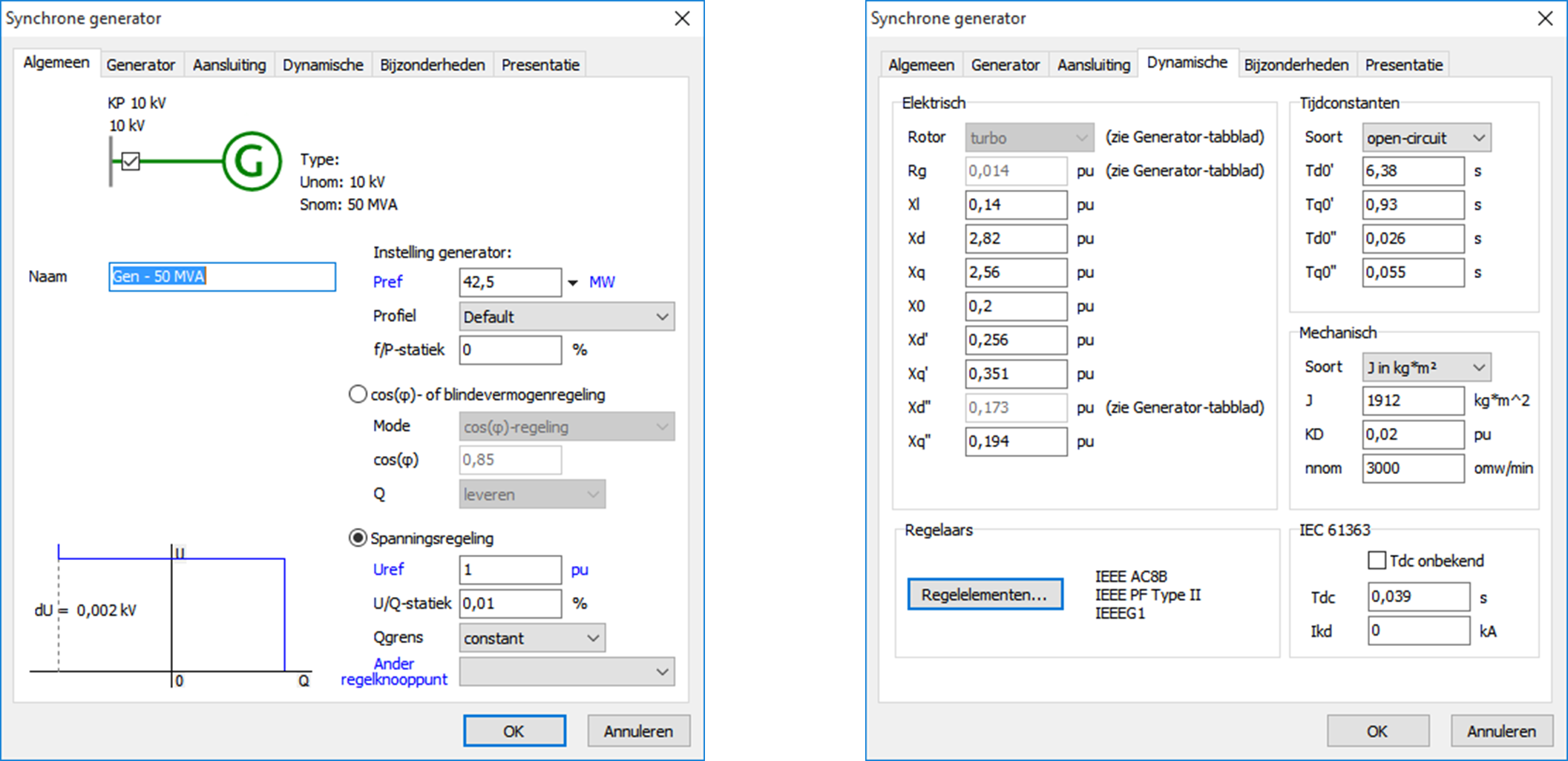
Sommige gegevens zijn al op andere tabbladen ingevuld, zoals het rotortype en de statorweerstand Rg. Overige gegevens die op het tabblad Dynamica ingevuld dienen te worden zijn:
Parameter |
Eenheid |
Omschrijving |
Xl |
p.u. |
lekkagereactantie |
Xd |
p.u. |
synchrone reactantie, d-as |
Xq |
p.u. |
synchrone reactantie, q-as |
X0 |
p.u. |
homopolaire reactantie |
Xd' |
p.u. |
transiënte reactantie, d-as |
Xq' |
p.u. |
transiënte reactantie, q-as (n.v.t. voor buitenpoolrotormachine) |
Xd'' |
p.u. |
subtransiënte reactantie, d-as |
Xq’’ |
p.u. |
subtransiënte reactantie, q-as |
Td0’ of Td’ |
s |
open- of short-circuit transiënte tijdconstante, d-as |
Tq0’ of Tq’ |
s |
open- of short-circuit transiënte tijdconstante, q-as (n.v.t. voor buitenpoolrotormachine) |
Td0’’ of Td’’ |
s |
open- of short-circuit subtransiënte tijdconstante, d-as |
Tq0’’ of Tq’’ |
s |
open- of short-circuit subtransiënte tijdconstante, q-as |
H of J |
s of kg∙m2 |
massatraagheid rotor en turbine opgeteld (H in s op Snom gebaseerd) |
KD |
p.u. |
rotorsnelheidsdempingcoëfficiënt (indien niet bekend: gebruik nul) |
nnom |
omw/min |
nominale snelheid |
Alle weerstanden en reactanties zijn in p.u. gebaseerd op nominale gegevens van de machine.
Bekrachtiging en spanningsregeling
De basisfunctie van een bekrachtigingssysteem is het leveren van een geregelde DC stroom aan de veldwikkelingen van de synchrone generator. Door deze stroom te variëren, varieert het magneetveld van de rotor en daarmee de in de stator-wikkelingen geïnduceerde spanning. In het onderstaande formulier heeft men de keuze uit 20 gestandaardiseerde IEEE modellen (IEEE Std. 421.5-2005).
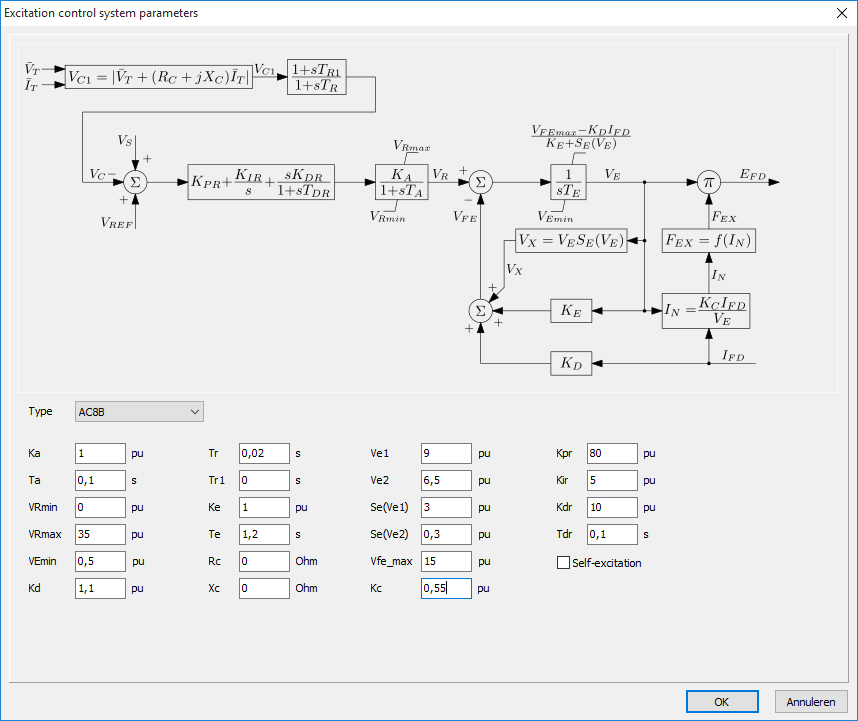
De als default ingevulde parameters mogen slechts als voorbeeld worden beschouwd, deze zijn noch typisch noch representatief. Voor een gedetailleerde beschrijving van de modellen en een uitgewerkt voorbeeld, zie: http://www.phasetophase.nl/pdf/SynchronousMachineExcitationSystems.pdf
Turbine- en vermogensregeling
Naast de bekrachtiging van de veldwikkelingen wordt het gedrag van een synchrone generator beïnvloed door het aandrijvende werktuig en zijn regeling. Met name voor de analyse van transiënte stabiliteit, waar het gaat over de bestudering van de consequenties van grote evenwichtsverstoringen, is het van belang dat het gedrag van de turbine en vermogensregeling correct gemodelleerd is. Binnen Vision zijn vijf door de IEEE voorgestelde modellen (PES-TR1) gemodelleerd, zie onderstaand formulier.
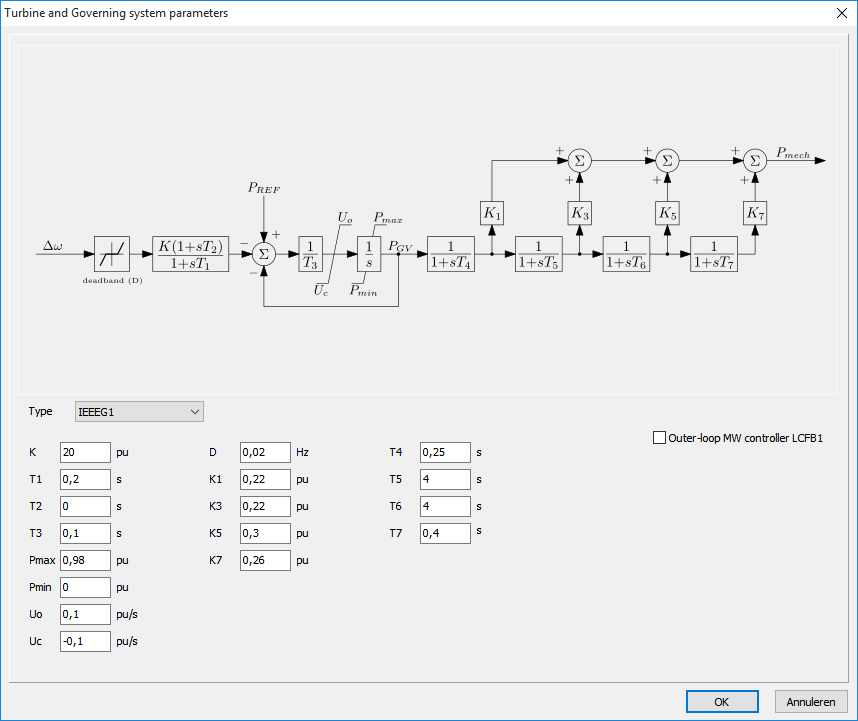
De als default ingevulde parameters mogen slechts als voorbeeld worden beschouwd, deze zijn noch typisch noch representatief. Voor een gedetailleerde beschrijving van de modellen en een uitgewerkt voorbeeld, zie: http://www.phasetophase.nl/pdf/SynchronousMachineTurbineGoverningSystems.pdf
Blindvermogen- en arbeidsfactorregeling
Bekrachtigingssystemen worden soms uitgerust met een blindvermogen- of arbeidsfactorregeling. Deze regeling is geïmplementeerd als een langzame buitenlus regelaar van de bekrachtiging en spanningsregeling. De referentie spanning VREF wordt geregeld door een PI-regelaar welke het verschil tussen referentie en gemeten blindvermogen of arbeidsfactor minimaliseert.
Blindvermogen-/arbeidsfactorregeling heeft zijn typische toepassing in de industrie, waar de generator veelal direct aan de hoofdrail gekoppeld is. De spanning op de klemmen van de generator dient in dit geval de waarde van het voedende externe netwerk aan te nemen, spanningsregeling van de synchrone generator hier dus ongewenst. In Vision zijn de door de IEEE gestandaardiseerde (Std. 421.5-2005) PF controller Type II en de var controller Type II modellen geïmplementeerd. Het type regeling inclusief de bijhorende parameters zijn in onderstaand formulier te specificeren.

De als default ingevulde parameters mogen slechts als voorbeeld worden beschouwd, deze zijn noch typisch noch representatief. Voor een gedetailleerde beschrijving van de modellen, zie: http://www.phasetophase.nl/pdf/SynchronousMachineExcitationSystems.pdf
Power System Stabilizer
Om slingeringen tussen eenheden te voorkomen wordt er soms een Power System Stabilizer toegepast (PSS) op synchrone generatoren. De functie van een PSS is het dempen van oscillaties in het net door een aanpassing van de rotorbekrachtiging van de synchrone generator. De output van de PSS is dus een input van het bekrachtigingssysteem. De input van de PSS is op dit moment vastgesteld op Δω, andere inputs zouden kunnen zijn: frequentie en vermogen. Hieronder het formulier waar zowel het type (type conform IEEE Std. 421.5-2005) als de bijhorende parameters gespecificeerd worden.

De als default ingevulde parameters mogen slechts als voorbeeld worden beschouwd, deze zijn noch typisch noch representatief. Voor een gedetailleerde beschrijving van het model, zie: http://www.phasetophase.nl/pdf/SynchronousMachineExcitationSystems.pdf
Asynchrone generator en motor
De asynchrone machine wordt met het gedetailleerde elektromagnetische model gerepresenteerd. Voor gedetailleerde beschrijving van het model, zie bijvoorbeeld het boek van Krause “Analysis of Electric Machinery and Drive Systems”. Het is mogelijk om te kiezen tussen enkele-kooi-model en dubbele-kooi-model. Enkele-kooi-model is het meest bekende model, maar het is in het algemeen niet nauwkeurig genoeg om zowel het aanlopen als het kortsluitgedrag van de machine goed te modelleren. Het dubbele-kooi-model lost dit probleem op. Daarom wordt geadviseerd om bij voorkeur het dubbele-kooi-model te gebruiken.
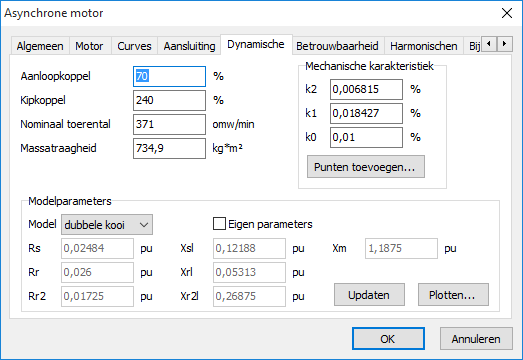
Extra invoerparameters van de asynchrone machine zijn:
•Aanloopkoppel, in procenten van nominale koppel
•Kipkoppel (of kritische koppel), in procenten van nominale koppel
•Nominaal toerentaal, omw/min
•Massatragheid, kg∙m2 (rotor en aangedreven mechanisme opgeteld)
•k2, k1, k0 zijn de coëfficiënten van de kwadratische benadering van de mechanische karakteristiek van de aangedreven mechanisme: Tm = k2∙n² + k1∙n + k0, waar Tm het mechanische koppel in procenten van nominale koppel is en n het toerental in procenten van nominale toerental. Het is mogelijk om de lineaire benadering te gebruiken (k2 = 0) of een constant mechanisch koppel (k2 en k1 = 0). Bij een constant mechanisch koppel wordt deze procentueel aangepast met het opgegeven asvermogen op tabblad Algemeen. Indien het mechanisch koppel niet constant is wordt het opgegeven asvermogen (Pas) alleen gebruikt tijdens de initialisatieprocedure, tijdens een dynamische simulatie zijn de opgegeven curves (Tm en Te) bepalend.
De eenvoudigste manier om de mechanische karakteristiek van de machine in te voeren, is via toevoegen van de gemeten punten (de knop Punten toevoegen…). Hierna verschijnt het volgende formulier:
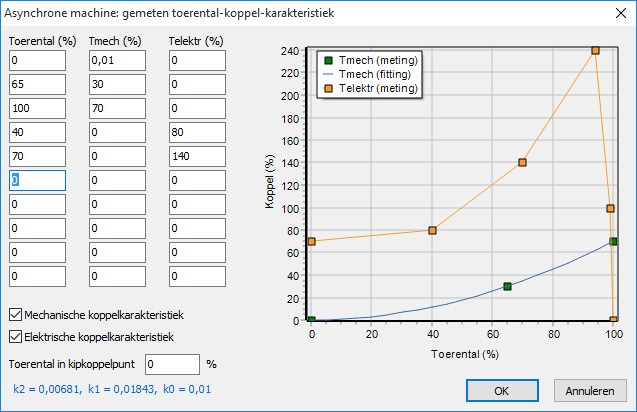
Hier kunnen de gemeten punten van de mechanische toerental-koppel-karakteristiek en/of van de elektrische toerental-koppel karakteristiek ingevoerd worden. Middels de punten van de mechanische koppelkarakteristiek worden de coëfficiënten k2, k1 en k0 bepaald. Als u op OK klikt, worden de waarden van de coëfficiënten in de respectievelijke velden automatisch ingevuld. De toegevoegde punten van de elektrische koppelkarakteristiek (indien bekend) worden voor een meer nauwkeurige bepaling van modelparameters gebruikt. Als het toerental in het kipkoppelpunt bekend is, kan dit ook toegevoegd worden. Als dit niet bekend is, dan kunt U deze op 0 zetten (het wordt dan intern automatisch bepaald).
Modelparameters worden uit de automatische oplossing van het volgende optimalisatieprobleem bepaald: vind modelparameters die zo goed mogelijk de bekende punten van de elektrische koppel-toerental karakteristiek en de statorstroom-toerental karakteristiek benaderen. Als geen extra punten bekend zijn, worden alleen de aanloopstroom, het aanloopkoppel, het kipkoppel en de nominale gegevens van de machine voor de automatische berekening van de modelparameters gebruikt. De nauwkeurigheid van het model wordt aanzienlijk verbetert bij de specificatie van meerdere punten.
Het is ook mogelijk om eigen modelparameters te specificeren, door Eigen parameters aan te vinken.
De knop Updaten wordt voor de automatische berekening van de modelparameters via optimalisatie gebruikt. De automatische berekening wordt ook toegepast in het geval dat Eigen parameters niet is aangevinkt en één of meer parameters veranderd worden (bijvoorbeeld het aanloopkoppel) en u op OK klikt.
De knop Plotten geeft de toerental-koppel en toerental-stroom karakteristieken voor de huidige modelparameters.
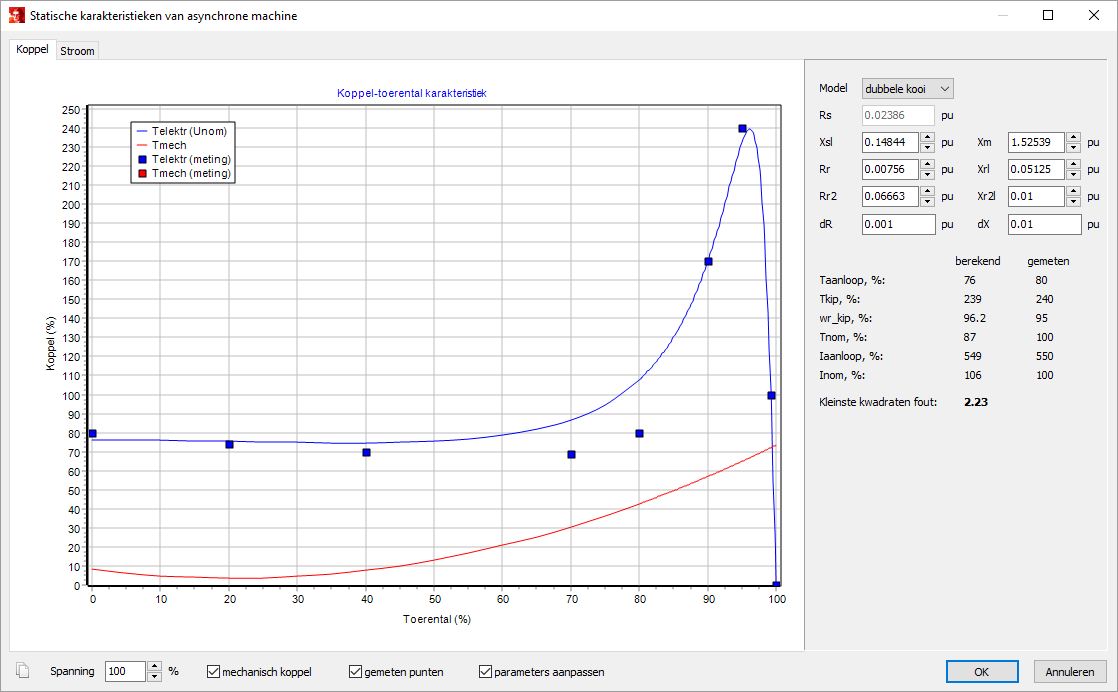
De karakteristieken zijn normaal bij de nominale spanning geplot. In geval van afwijkende statorspanningen is het ook mogelijk om deze aan te passen middels het Spanning invoerveld.
Het vinkje gemeten punten toont de punten aan die via Punten toevoegen... zijn opgegeven.
Door het vinkje parameters aanpassen te selecteren is de gebruiker in staat om de invloed van het aanpassen van de parameters op de karakteristiek te beoordelen. Deze aanpassing vindt plaats via directe wijziging van parameter waarde of via pijltjes naast de desbetreffende invoerveld te klikken. In het laatste geval wordt de bijhorende parameter verhoogd/verlaagt met de waarde die in dR (voor weerstanden) of dX (voor reactanties) invoerveld gegeven is. De afwijkingen van de belangrijkste punten zijn in het rechter deel van de venster in numerieke vorm opgesomd. Deze berekende punten komen van de berekening van karakteristieken met gebruik van modelparameters. De gemeten punten zijn de gegevens die door de gebruiker gespecificeerd zijn bij de invoer van de asynchrone machine naamplaatgegevens. Kleinste kwadraten fout geeft aan hoe goed de berekende karakteristieken de werkelijkheid (de gemeten punten) benaderen. Hoe kleiner is dit getal, hoe beter de benadering is. Indien de parameters aangepast zijn en op de OK knop is geklikt, worden parameters automatisch ingelezen naar de desbetreffende invoervelden van de hoofdvenster.